
Main design points and configuration list

The positioner is suitable for welding workpieces with welds around them.
The double-station structure design allows loading and unloading of materials in the same position area during welding.
The workpieces are easy to pick up and put in, and easy to operate; clamping devices such as precision pneumatic chucks are used.
The workpieces are picked up and put in manually, and the robot automatically welds; the welding workstation can be supervised by ordinary workers.
When switching between different types of workpieces, the manual input of product parameters on the touch screen interface is required to retrieve the welding process parameter library, and welding can be performed without teaching.
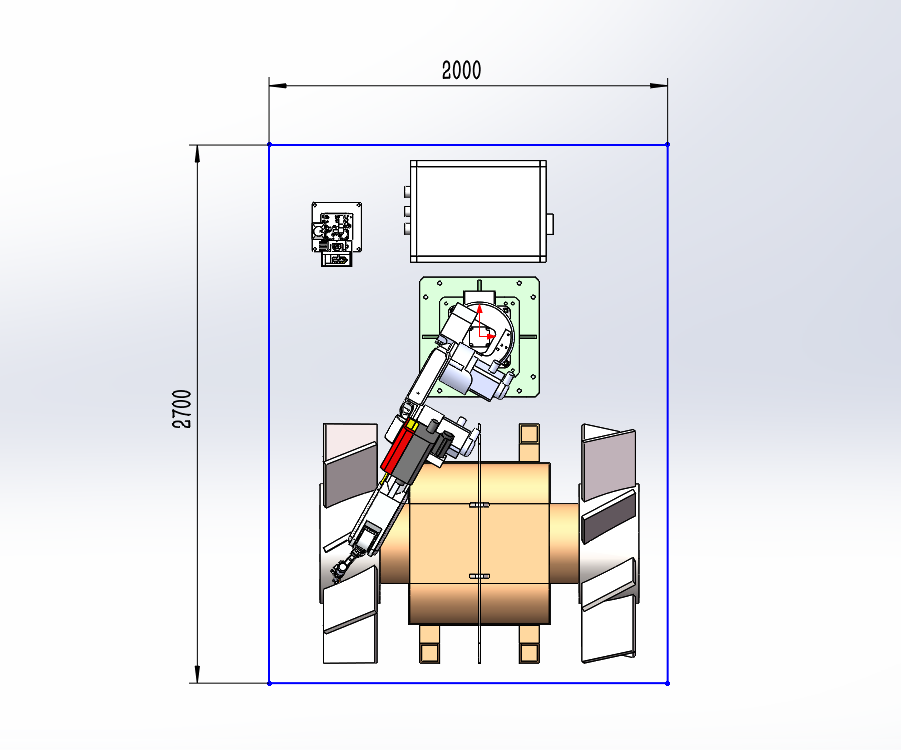
Schematic diagram of three-dimensional layout
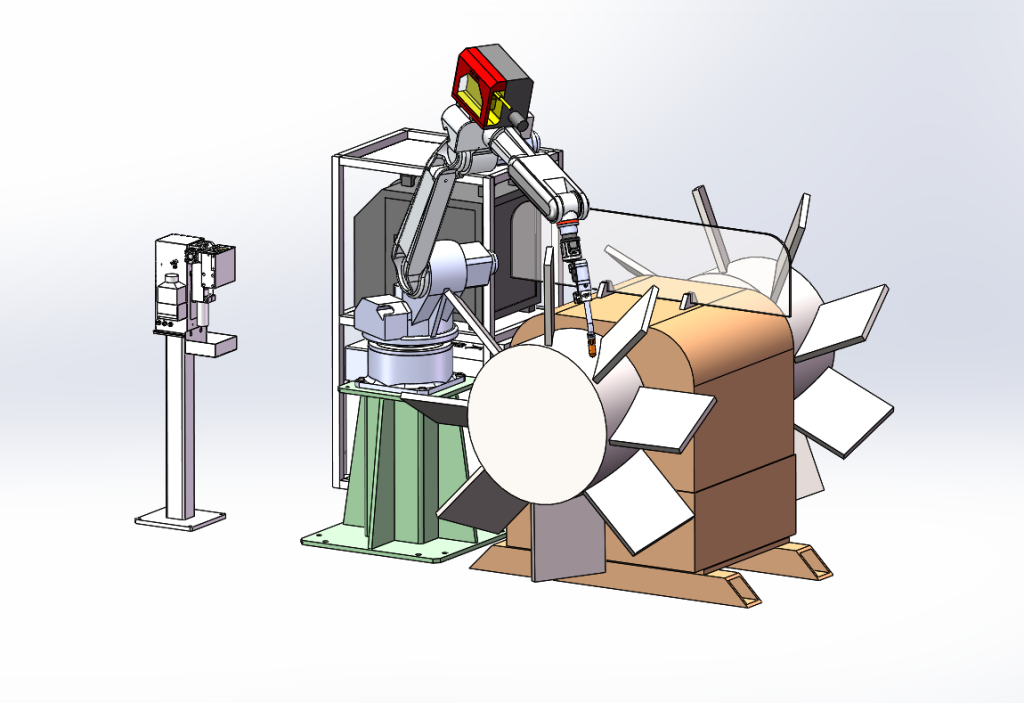
1 set of welding robot: including robot body, robot fixed base, welding gun and wire feeding system, safety protection device, etc.; mainly responsible for realizing the motion trajectory of automatic welding workpiece.
1 set of welding machine module: including welding machine power supply.. control cabinet; mainly responsible for realizing the relevant performance parameters such as current and voltage required for welding process and the running program instructions of the entire workstation automatic control
1 set of dual-axis positioner: mainly responsible for the fixed welding tooling flip position to ensure that the robot can accurately reach each weld position of the workpiece.
1 set of gun cleaning station: mainly responsible for cleaning welding slag to ensure long-term welding of the machine.
1 set of parameterized programming system: including touch screen system, mainly responsible for the input of impeller parameters and the call of welding process parameters.
1 set of line laser tracking sensor: including laser tracking sensor, control system, and positioning function package.
Production process
After manually spot welding and assembling the parts, place them on the fixture platform
Determine the impeller size and welding process parameters
The robot automatically plans the welding process according to the product parameters
The robot welds according to the welding procedure
If manual correction is required, it can be corrected directly at a single station, and the robot can weld at another station
Applicable product range

- Size: The gap between the impellers can meet the entry of the automatic welding gun
- Weight: within 300kg
- Board thickness: 2mm and above
- Structure: 8 or 6 impellers
- Air volume: Impeller angle is not limited
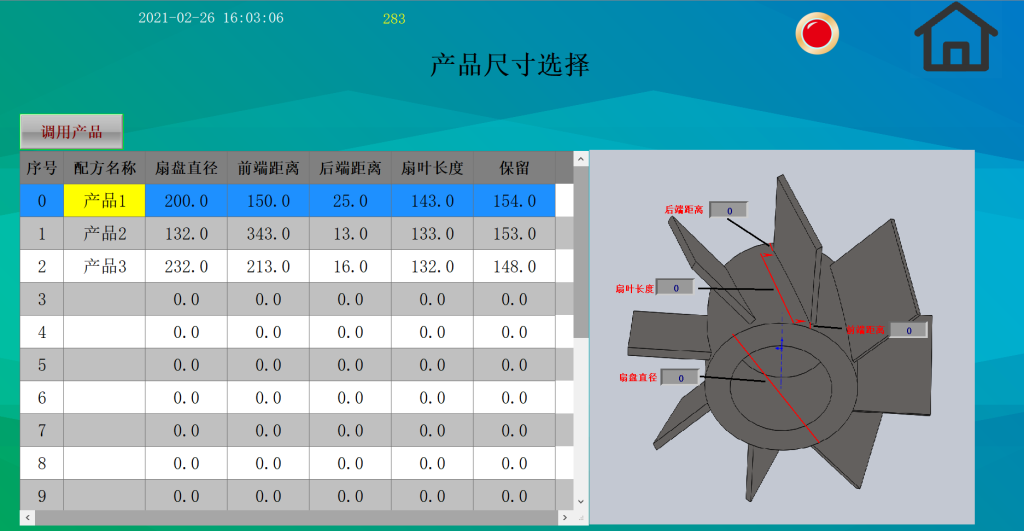
Parametric programming software system
14-inch large screen display: convenient operation, intuitive display
Robot operation status/position monitoring/welding parameter monitoring/welding operation
Impeller size selection: no need for teaching programming
You can directly enter the product specifications and dimensions on the touch screen interface, or select them by importing them through Excel tables according to the production plan.
Welding process library:
Depending on the thickness or material of the impeller, different process parameter libraries are called. It can also be imported through Excel tables according to the process parameter table.
Robot status monitoring:
Real-time monitoring of welding trajectory and welding parameters facilitates product problem tracing, and can also be uploaded to the server to view historical data.
Production information monitoring:
Efficiency calculation based on production capacity and production optimization.
Comment (1)
Sed faucibus placerat bibendum. Maecenas sollicitudin commodo justo, quis hendrerit leo consequat ac. Proin sit amet risus sapien, eget interdum dui. Proin justo sapien, varius sit amet hendrerit id, egestas quis mauris.